Walkbot: Eine revolutionäre Therapie für Schlaganfallpatienten mit Robotertechnologie
Schlaganfall ist eine der Hauptursachen für Bewegungsstörungen. Hemiparese bzw. Hemiplegie ist die häufigste Folge eines Schlaganfalls und führt zu Bewegungsdefiziten in den kontralateralen Gliedmaßen an der vom Schlaganfall betroffenen Seite des Gehirns. Die wichtigsten klinischen Merkmale, die bei hemiparetischen Patienten beobachtet werden, sind: Schwäche spezifischer Muskeln, abnormaler Muskeltonus, abnormale Haltungsanpassungen, mangelnde Mobilität, abnormale Bewegungssynergien, Verlust der Gelenkkoordination und Verlust der Empfindlichkeit.

Daher besteht das Rehabilitationsziel bei Patienten nach Schlaganfall darin, die Wiederherstellung verlorener Funktionen zu fördern, um Unabhängigkeit und frühzeitige Wiedereingliederung in das soziale und häusliche Leben zu ermöglichen. Post-Schlaganfall-Patienten benötigen eine kontinuierliche medizinische Versorgung und eine intensive Rehabilitation, die häufig eine persönliche manuelle Interaktion mit dem Physiotherapeuten erfordert. Leider erlauben die gegenwärtigen Anforderungen und Budgetbeschränkungen diese intensive Rehabilitation nicht. Daher besteht ein Drang nach neuen Technologien, die die Leistungsfähigkeit und Wirksamkeit der Rehabilitation nach Schlaganfall verbessern. Die verfügbare wissenschaftliche Literatur legt nahe, dass die wirksamsten rehabilitativen Interventionen diejenigen sind, die eine frühe, intensive, aufgabenspezifische und multisensorische Stimulation bieten. Die gute Nachricht ist, dass es eine revolutionäre Therapie für Schlaganfallpatienten gibt, die als Walkbot bekannt ist. Lassen Sie uns überprüfen, wie diese Robotertechnologie Menschen mit Schlaganfallpatienten hilft.
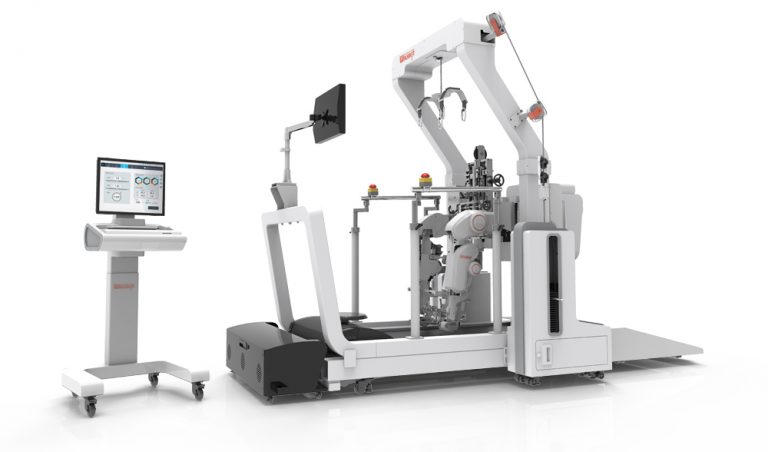
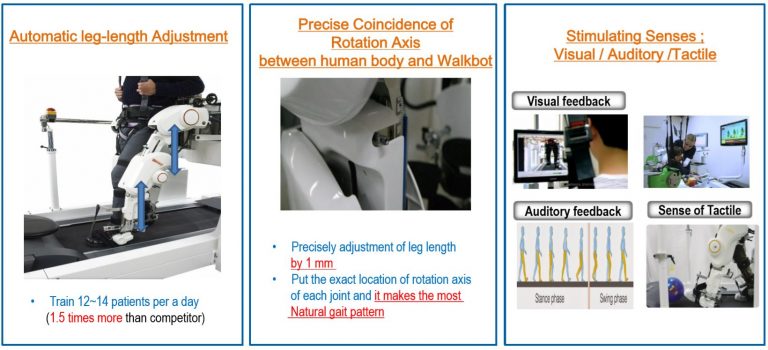
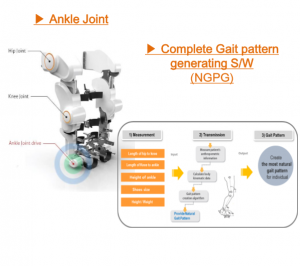
Das Walkbot-System ist das innovative, auf Hüfte, Knie und Knöchel abgestimmte Robotertrainingssystem, das eine genaue propriozeptive, kinematische und kinetische Führung sowie eine variable Fehlerpraxis und hochintensive, sich wiederholende aufgabenspezifische und interaktive Übungen bietet für die paretische untere Extremität. Im Vergleich zu aktuellen robotergestützten Gangtrainingssystemen für das Exoskelett ist das Walkbot-System mit mehrsegmentigen Sprung-Knie- und Hüftgelenk-Aktuatoren ausgestattet, die ein optimales, natürlich koordiniertes, intersegmentales Bewegungsmuster für den Bewegungsapparat bietet. Darüber hinaus erleichtern die Aktuatoren des Sprung-Knie- und Hüftgelenks die Dorsalflexion des Knöchels, wodurch ein Spitzfuß und das damit verbundene Wernicke-Mann-Gangbild oder Duchenne-Hinken verhindert werden, wodurch ein sicheres Gehen ohne Risiko oder Sturz ermöglicht wird.
Das Walkbot-System bietet einen intelligenten interaktiven Modus, der automatisch die Spastik oder die damit verbundenen Steifheits-, Unterstützungs- und Widerstandskräfte, die Gehgeschwindigkeit sowie die Kinetik und Kinematik von Hüfte, Knie und Sprunggelenk entsprechend der laufenden Bewegungsleistung des Patienten berücksichtigt, um das „automatische“ Wiedererlernen, Erhalten und die vollständige Genesung des Bewegungsapparates zu maximieren.
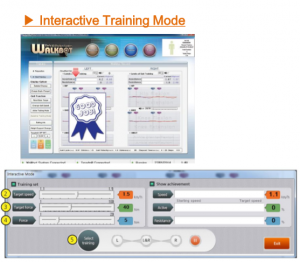
Das Walkbot-System wurde entwickelt, um diese Vorteile in einer unterhaltsamen und motivierenden Umgebung mit Virtuellen-Realität-Augmentierten Realität (VR-AR) bereitzustellen, um die aktive Aufteilung und die damit verbundene Wiederherstellung des Bewegungsapparates zu maximieren.
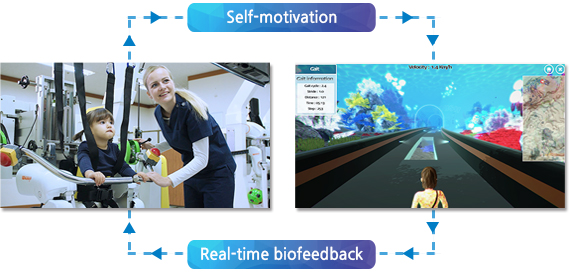
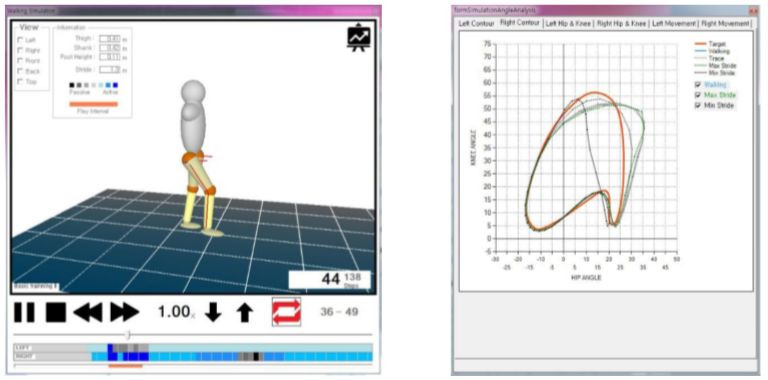
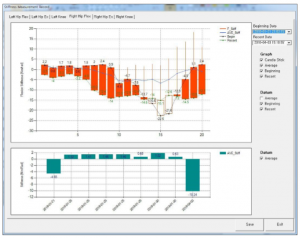
Das Walkbot-System kann die Kinematik, Kinetik und spastizitätsbedingte Steifheit beim Gehen mit dem Laufband quantitativ bewerten. Diese Informationen werden für die sensomotorische Rückmeldung während des Training des Bewegungsapparates verwendet.
Darüber hinaus ist das Walkbot-System so konzipiert, dass es dem Therapeuten ein intensives Training mit minimaler Arbeit oder körperlicher Belastung bietet und ein multisensorisches Stimulationstraining bietet.